

2.3. Ajuste de los mapas AFR
Ícono para el Advanced mode
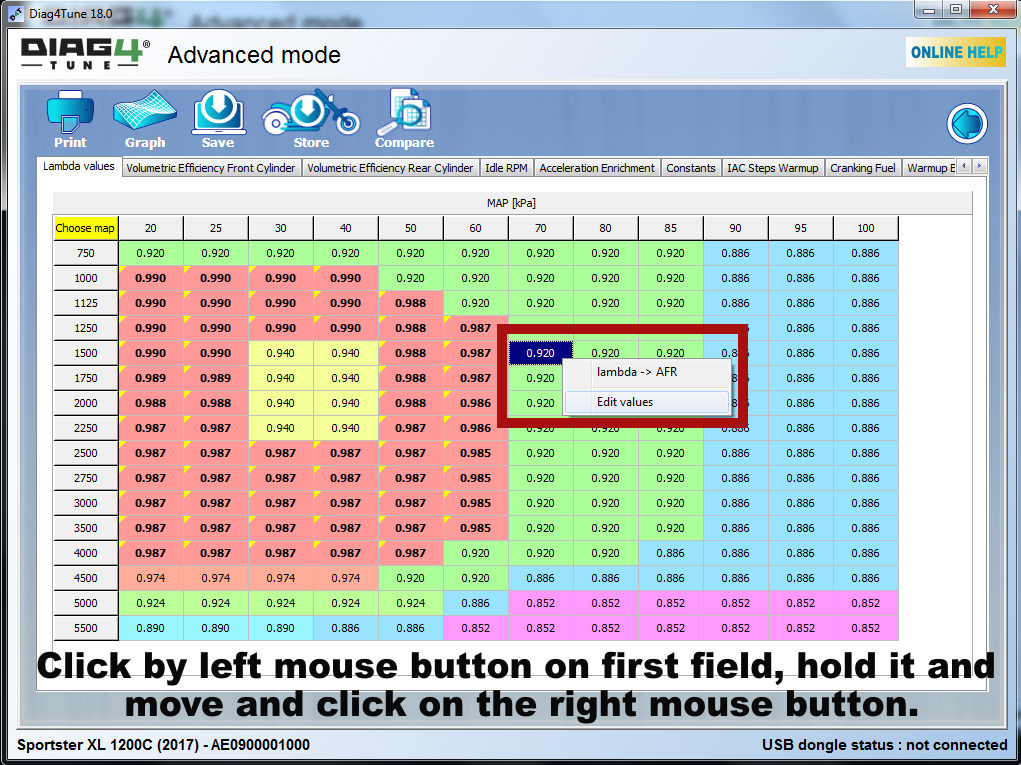
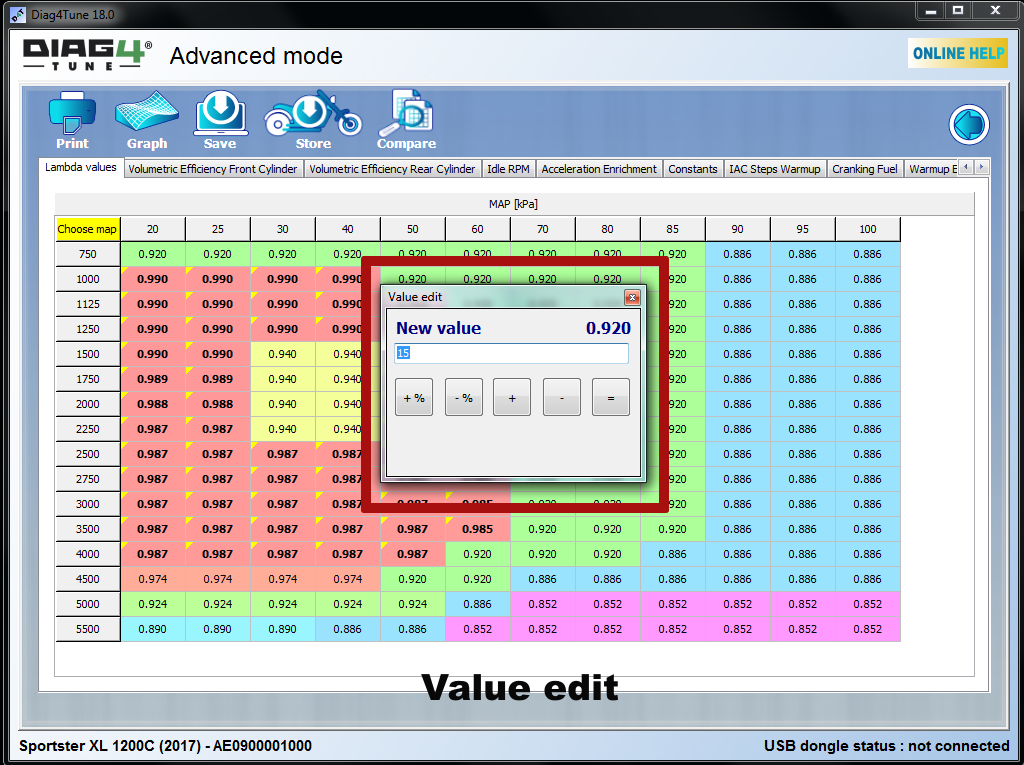
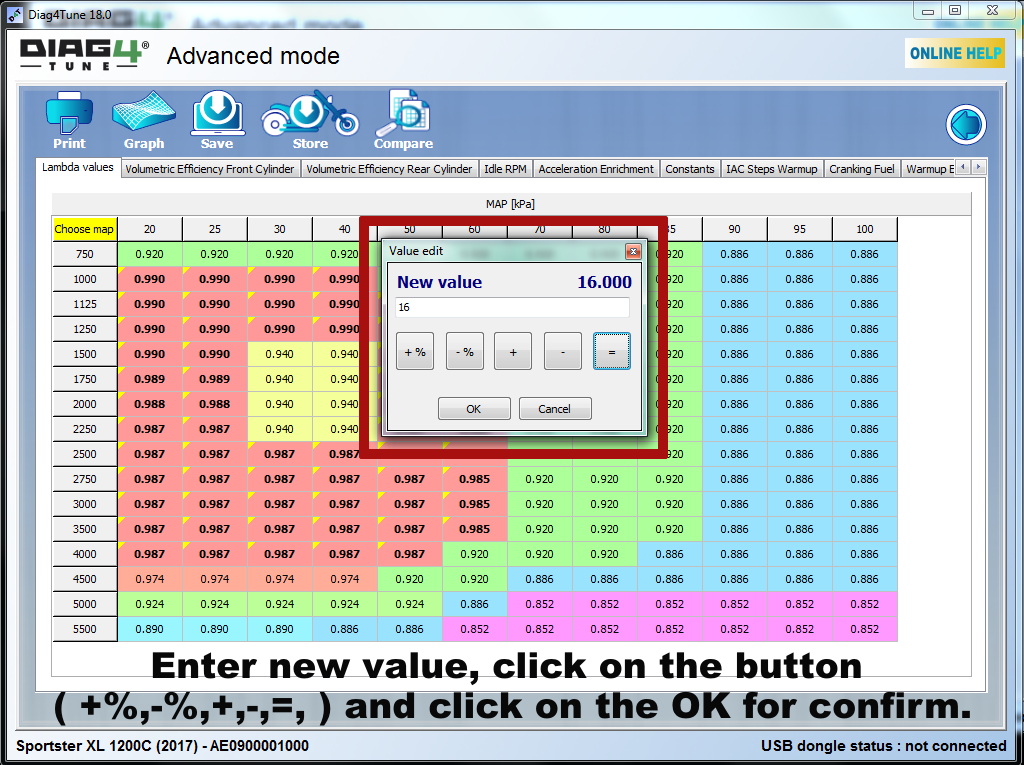
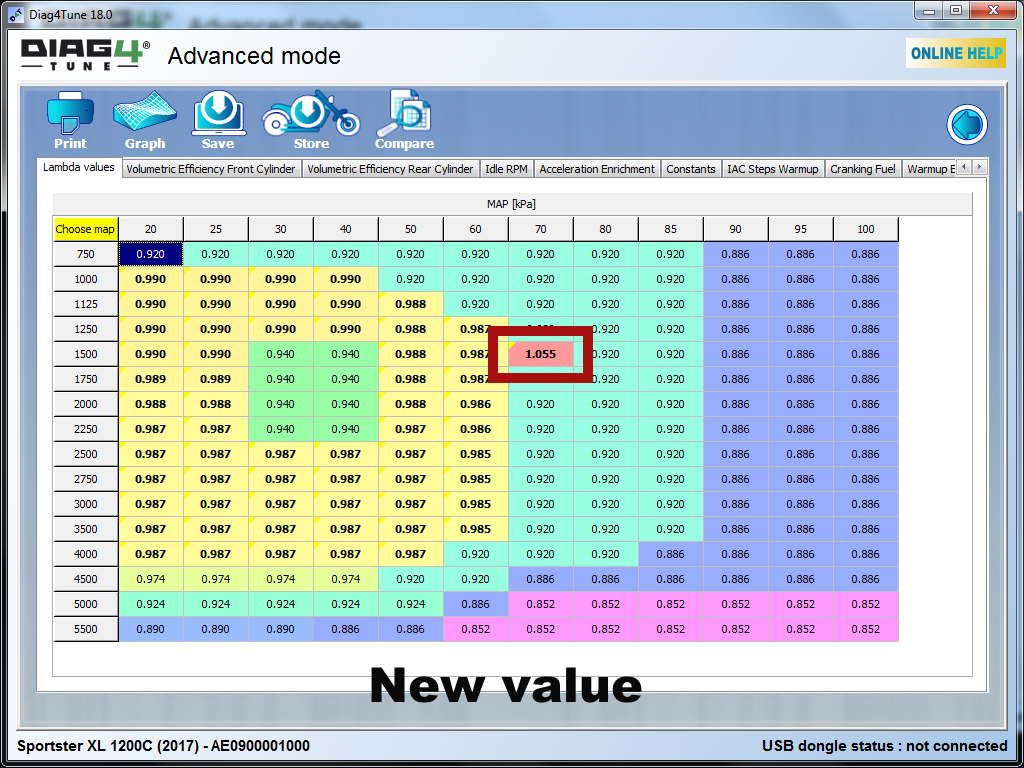
Manual settings Values
Advanced mode es una herramienta para el ajuste de todos los mapas accesibles dentro de este modo. Esto incluye los mapas AFR, VE, los mapas avanzados y limitadores de revoluciones. La utilización del Advanced mode para optimizar los mapas de combustible es una continuación lógica de las mediciones VE – puede medir como el motor (y cada uno de sus cilindros) respira.
El modo avanzado perite cambiar manualmente los valores VE, sin embargo esto carece de sentido en el caso de que los haya medido.
El siguiente paso dentro de la optimalización de los mapas de combustible es el ajuste – mapas AFR. El mapa AFR determina los valores finales del AFR, que sirven como la base principal para el sistema de la unidad de control. El sistema de la unidad de control calcula la cantidad del combustible introducido y, por ende, el AFR actual del motor.
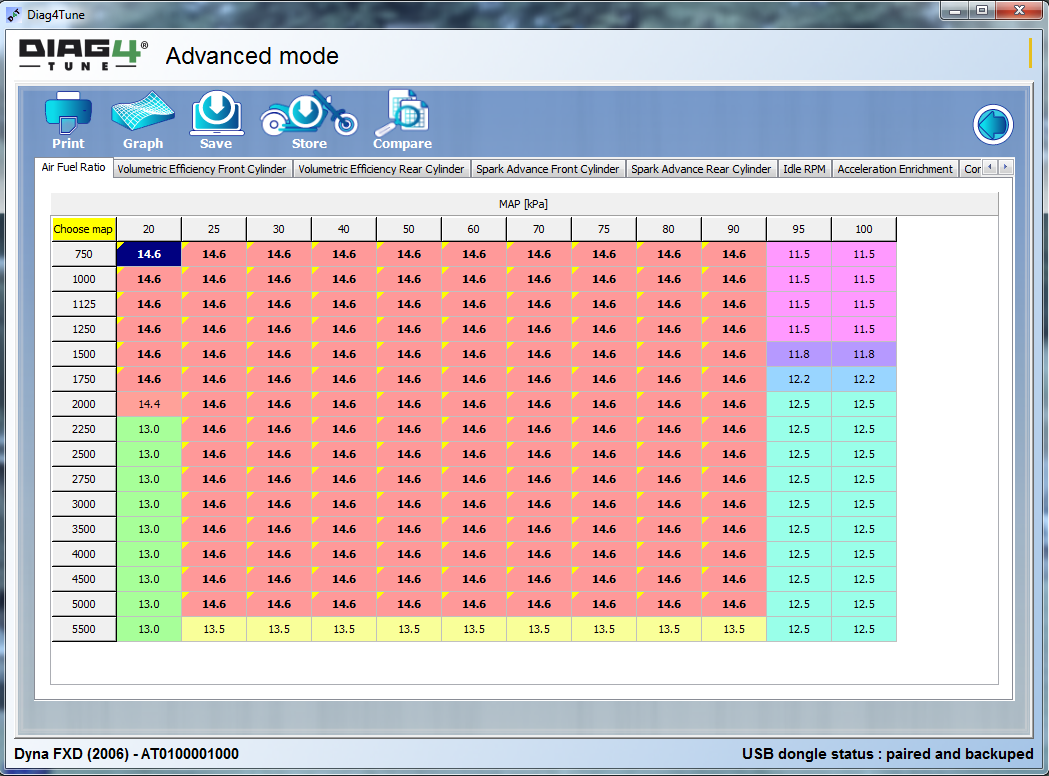
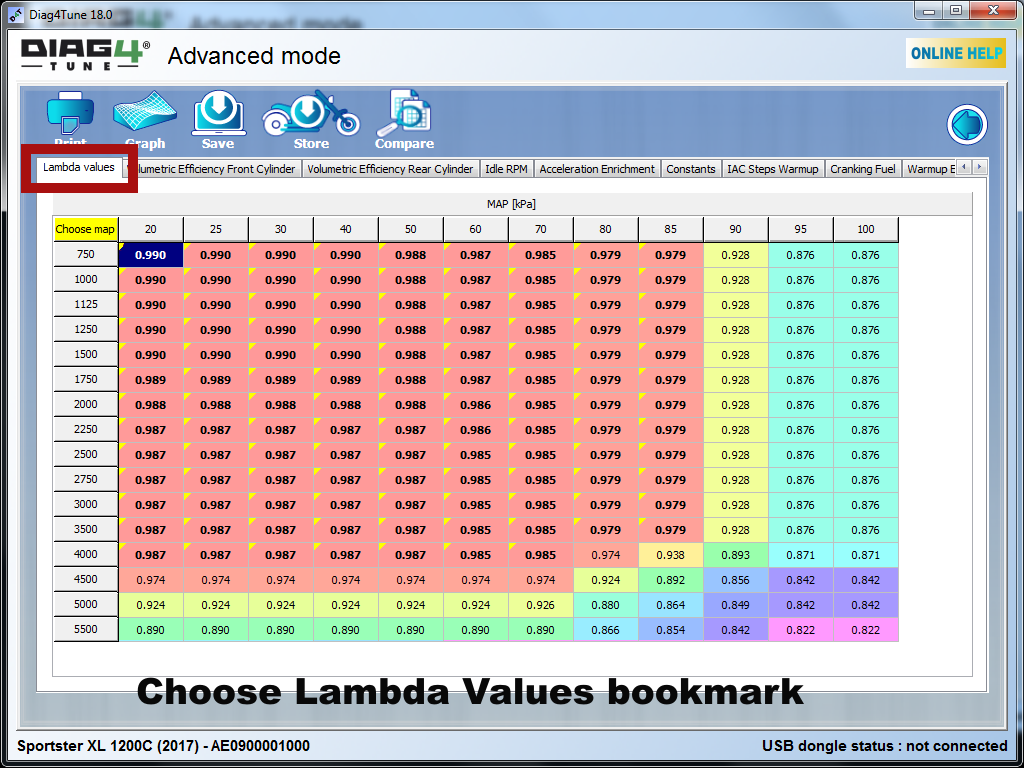
Un ejemplo del típico mapa AFR (XL 1200), lo puede ver en la imagen izquierda. La unidad de control ajusta el AFR basándose en la realimentación desde las sondas Lambda, al hallarse el valor del AFR en la tabla 14.6.
Un AFR más bajo (es decir una mezcla más rica) se introduce únicamente para los regímenes extremos (altas revoluciones, pleno gas, presión de aspiración casi 100 kPa). La principal razón para utilizar una mezcla más rica en los regímenes extremos es una mejor refrigeración del motor y una ligera subida de rendimiento (véase más abajo). Una mezcla relativamente rica se ajusta también para la zona de la mariposa de estrangulación en todo el rango de revoluciones (presión de aspiración alrededor de 20 kPa). Esto se hace para eliminar las explosiones en el tubo de escape durante la desaceleración.
Los regímenes límite descritos más arriba no son interesantes del punto de vista del tuneo (salvo en el caso de que deseamos molestar al vecino o su perro con las llamas salientes del tubo de escape). Nuestro interés debería mientras tanto centrarse en conseguir el valor de AFR en 14,6, es decir deberíamos orientarnos en el control de la proporción de a mezcla utilizando la información desde los sensores Lambda. Esto es, sin duda, la manera ideal de control tanto desde el punto de vista de emisiones de motor como, en cierto modo, del punto de vista del consumo de combustible. Sin embargo, es evidente que esto no es ideal en el caso cuando lo que queremos es maximizar el par motor y rendimento del motor que se rigen por las siguientes características.

Modelo del par motor máximo del motor V-Twin en función del AFR utilizado.
Estas características muestran las curvas del par motor máximo del motor V-Twin (con revoluciones dentro del rango de 2500 hasta 3000 min-1) en función del AFR utilizad. La curva verde representa una medición con la mariposa de estrangulación abierta al 100 %. La curva naranja representa el modelo del par motor máximo con el nivel de gas subido continuamente hasta el 60 %. La curva negra muestra un valor medio. Los resultados de la medición demuestran que el aumento de la característica del par motor se puede conseguir tan solo mediante un ajuste apropiado del AFR.
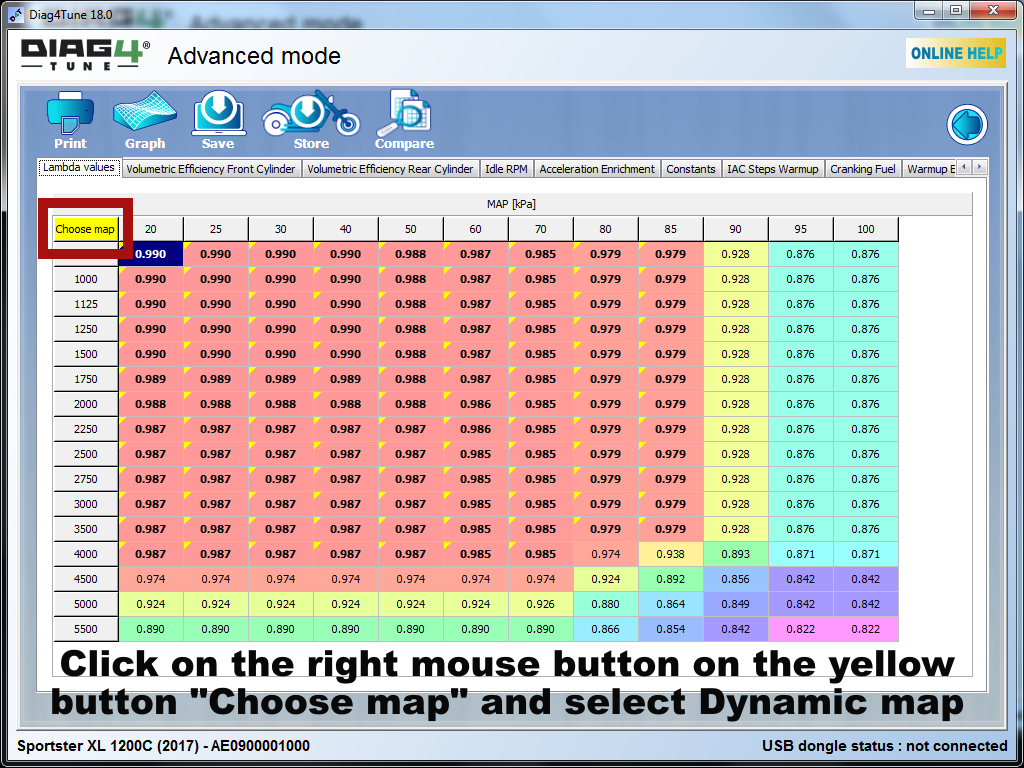
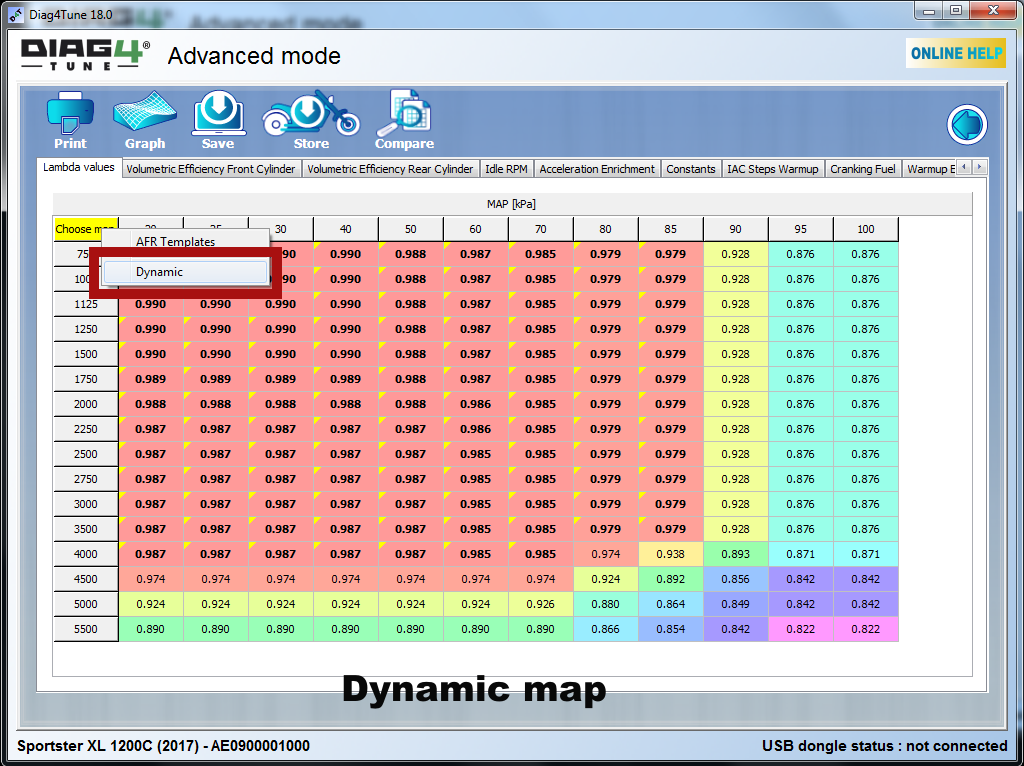
Nuestro desarrollo nos permitió definir los mapas AFR ATAL dinámicos. Estos mapas predefinidos funcionan como plantillas de los mapas AFR (véase la película demo 1). A base de unas pruebas en carretera hemos definido el área importante para un régimen de marcha estable con un mínimo de requerimientos dinámicos. En estos regímenes no hace falta aumentar las características del par motor ya que se presta más atención al funcionamiento económico y por eso también se quieren minimizar las emisiones del moto.
Estos regímenes típicamente se encuentran dentro del rango delimitado por la presión de aspiración de hasta 60 kPa. En este caso lo ideal es mantener el AFR final en 14,6, es decir para controlar la proporción de la mezcla mediante un bucle cerrado de los sensores Lambda.
Sin embargo, nos encontramos con una situación bien distinta en el rango por encima de 70 kPa, definidos a base de la presión de aspiración. Este rango representa los regímenes dinámicos (aceleración), en los que es deseable aprovechar el pleno potencial del motor a costa de la economía de su marcha. En estos regímenes hace falta ajustar los valores deseados del AFR en el rango desde 12,5 hasta 13,5 – véase la imagen más abajo.
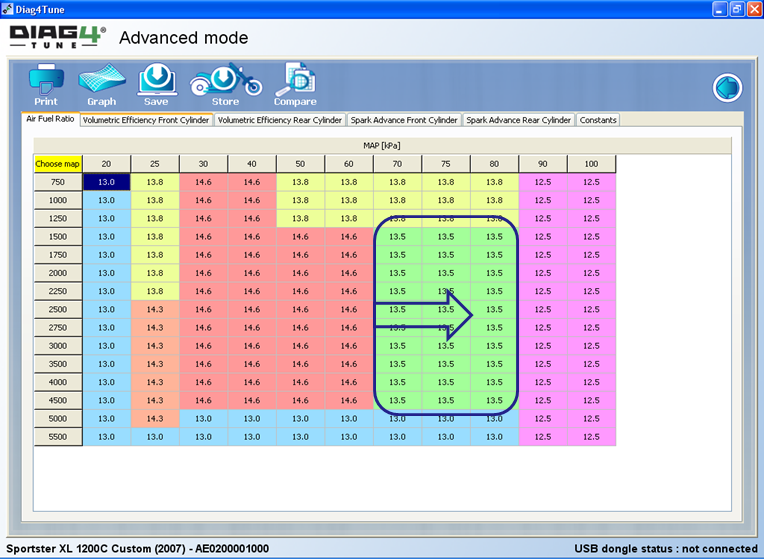
Un ejemplo (B) de un mapa AFR típico (XL 1200)
Como ya hemos mencionado, el objetivo del tuneo no se limita en aumentar las características del rendimiento. Incluye también su comodidad en marcha. Un ejemplo bien conocido es el comportamiento del motor XL 1200, Evolution con aspiración y tubo de escape abiertos, en ciudad marchando a 50 km / h (30 mph), típicamente con la tercera velocidad metida. En estos regímenes el motor presenta ciertas irregularidades de marcha que resultan muy desagradables y pueden incluso llegar a afectar la seguridad. Después de haber realizado muchos análisis llegamos a la conclusión de que este comportamiento se debe a una inestabilidad del bucle cerrado de la regulación de la sonda lambda. El arreglo capaz de limitar notablemente o bien eliminar completamente los comportamientos indeseados del motor Evolution, consiste en ajustar AFR dentro del rango 13,5–14 (dentro del régimen en cuestión), para apagar la realimentación desde la sonda Lambda. De todas formas existe aquí un amplio espacio para las pruebas realizadas por el operador de tuneo. De vez en cuando encontramos un problema parecido en los motores Twin Cam.
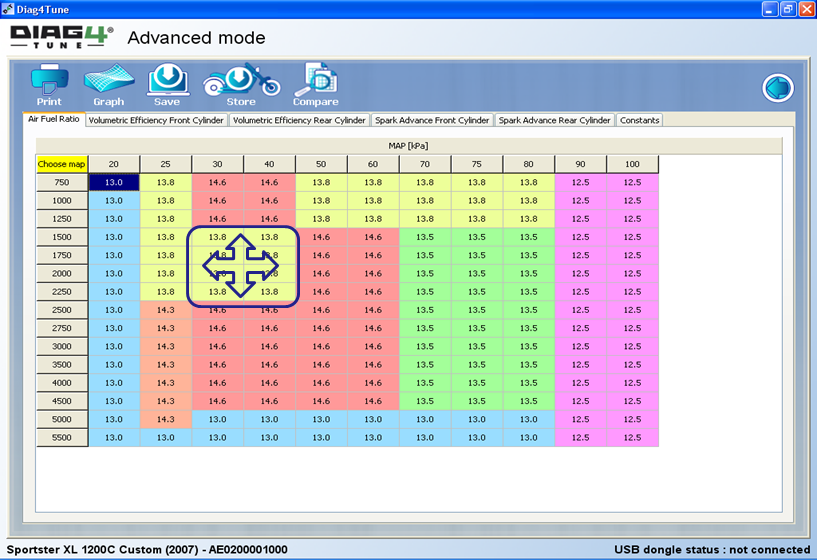
Un ejemplo (C) de un mapa AFR típico (XL 1200)
