

2.3. Az AFR térkép beállítása
Az Advanced mode ikonja
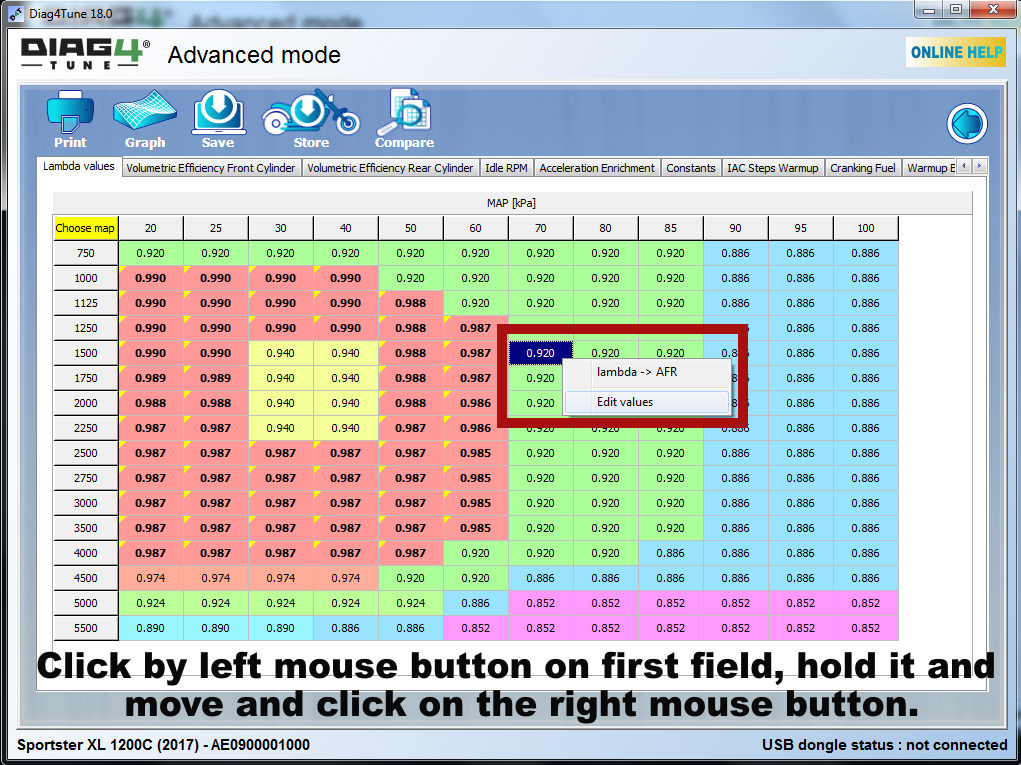
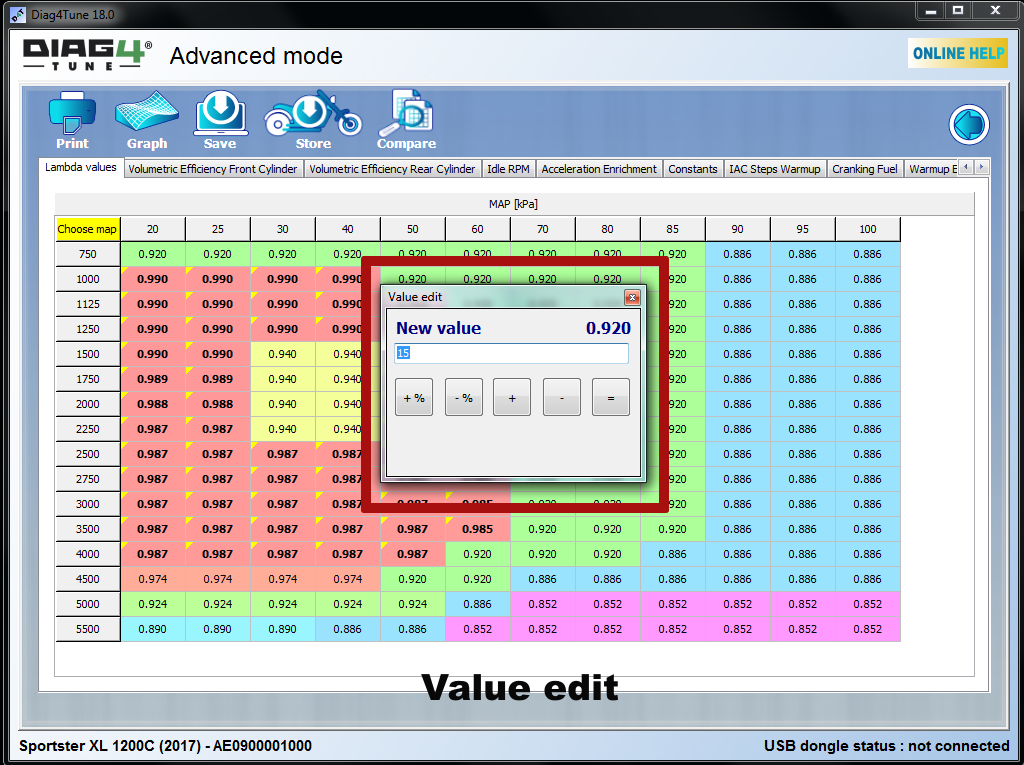
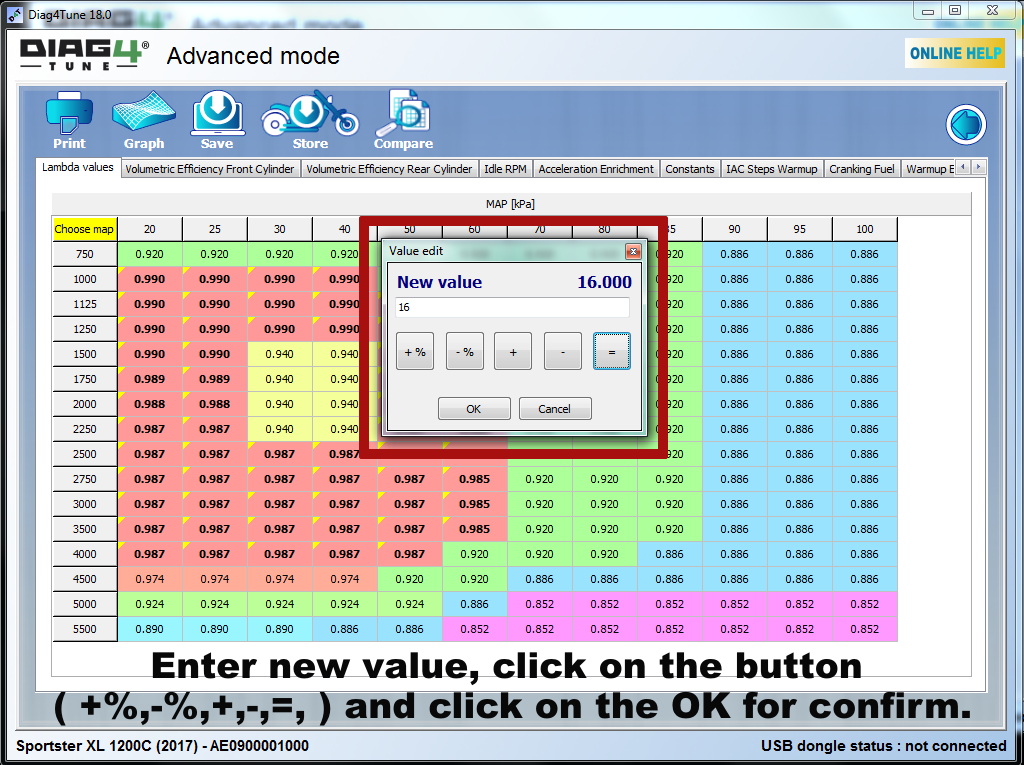
Manual settings Values
Az „Advanced mode” a fenti módban elérhető összes térkép módosítására szolgáló eszköz. Ez tartalmazza az „AFR” térképeket, a „VE” térképeket, a gyújtás és a fordulatszám határoló haladó térképeit. Az Advanced mode alkalmazása az üzemanyag térképek optimalizációjához a VE mérés logikus folytatása, megmérheti, hogyan lélegzik a motor (minden egyes hengere).
A kibővített üzemmód lehetővé teszi a VE értékek kézi módosítását, de erre nincs szükség, ha már lemérte ezeket.
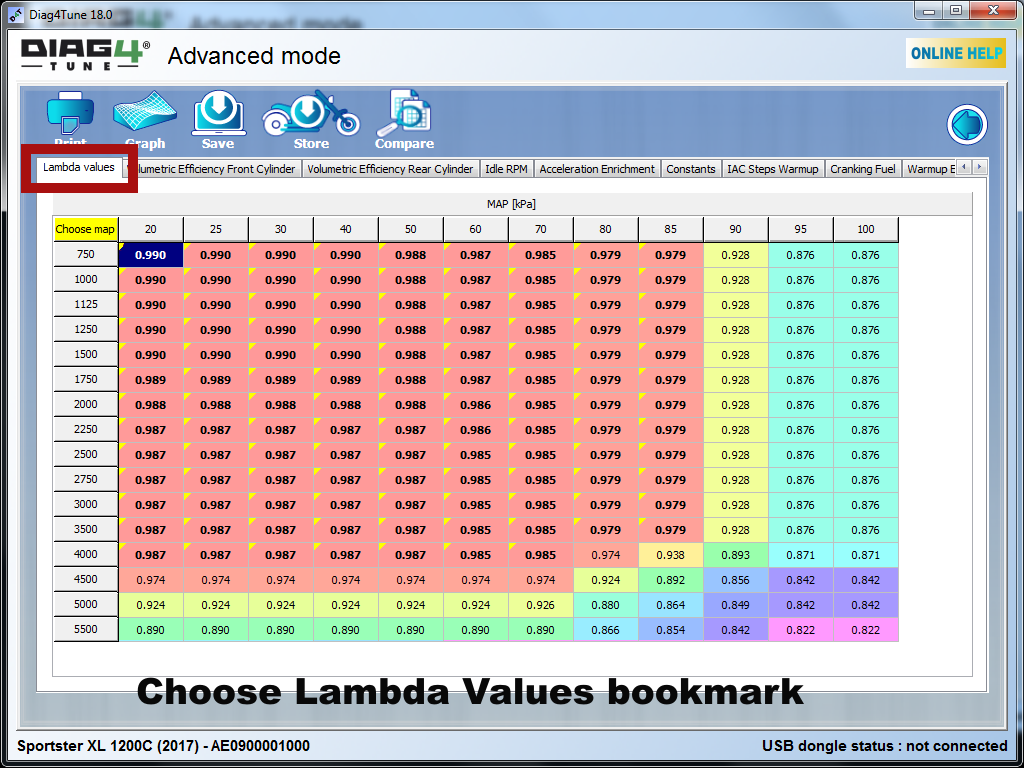
Az üzemanyag térképek optimalizációs folyamatának következő lépése az AFR térkép beállítása. Az AFR térkép határozza meg az AFR célértékeit, amelyek a vezérlőegység rendszer legfőbb alapját képezik. A vezérlőegység rendszer számítja ki befecskendezett üzemanyag mennyiségét és egyben az aktuális AFR-t a motorban.
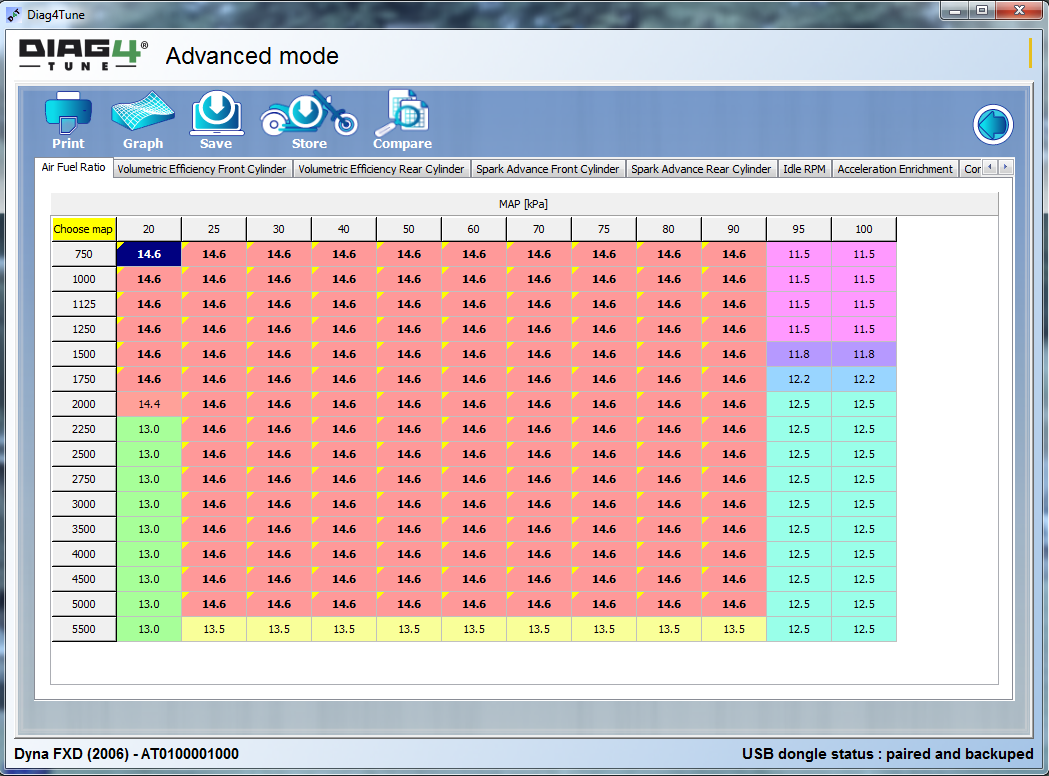
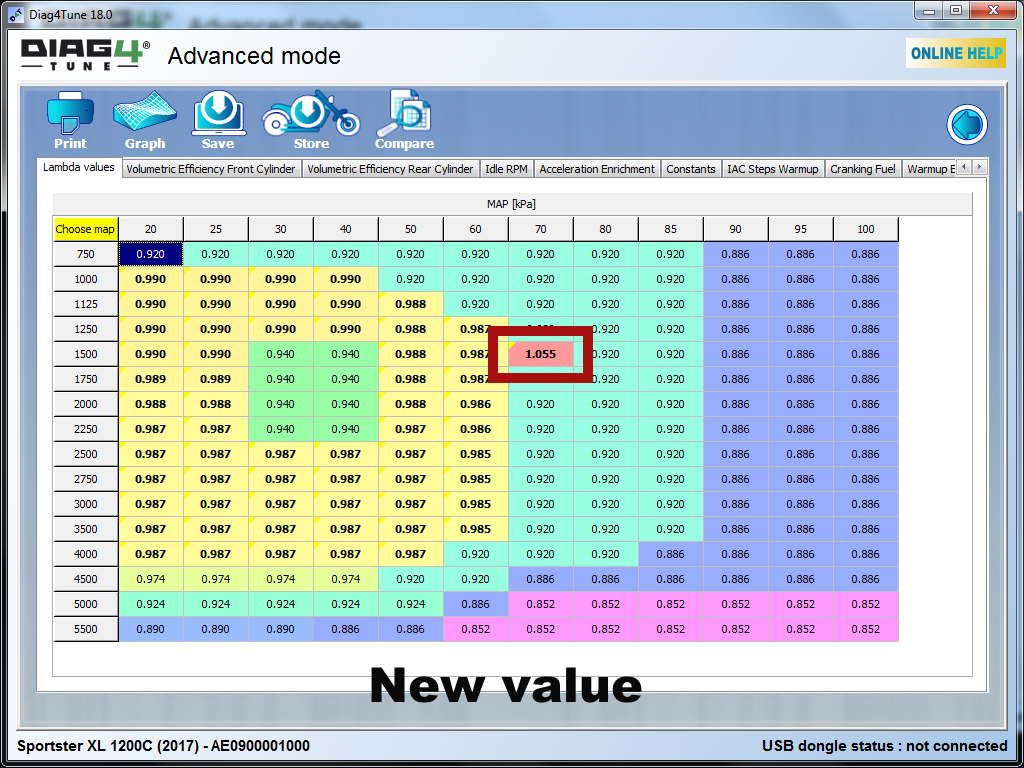
Példa a jellegzetes AFR térképre (XL 1200), a térkép a bal oldali képen látható. A vezérlőegység az AFR-t a Lambda-szondából érkező visszacsatolás alapján állítja be, amennyiben AFR-ben lévő értéket a 14.6 táblázat tartalmazza.
Az alacsonyabb AFR (gazdagabb keverék) csak az extrém üzemmódokra van beállítva (magas fordulatszám és teljes gáz, a szívóoldali nyomás csaknem 100 kPa). A gazdagabb keverék felhasználásának legfőbb oka a szélsőséges üzemmódban a motor jobb hűtése és a részleges teljesítménynövelés (lásd lentebb). Az aránylag gazdagabb keverék a lezárt fojtószelep térségében is be van állítva a teljes fordulatszám tartományban (a szívóoldali nyomás 20 kPa körüli). Mégpedig a kipufogóban felmerülő belső robbanás csökkentése érdekében lassításkor.
Az előző bekezdésben leírt köztes üzemmódok nem lényegesek a tuning szempontjából (hacsak nem az a célunk, hogy a szomszédot vagy a kutyákat bosszantsuk a kipufogóból kicsapó lánggal). A mi érdeklődési területünknek az volna a célja, hogy az AFR értékeket a 14,6-re állítsuk, vagyis Elsősorban a keverési arány ellenőrzésével kell foglalkoznunk a lambda-szondából érkező visszacsatolás alapján. Ez kétségtelenül a motor károsanyag kibocsátás és többé-kevésbé az üzemanyag fogyasztás ellenőrzésének legjobb módja. Ugyanakkor nyilvánvaló, hogy ez nem optimális, ha motor forgatónyomatékának és teljesítményének elérése a cél, amelyet a következők jellemeznek.

A V-Twin motor maximális forgatónyomatékának modellje a beállított AFR függvényében.
Ezeket a jellemzőket mutatják a V-Twin motor maximális forgatónyomatékának görbéi (amelyek a a 2500-tól 3000 min-1-ig terjedő fordulatszám tartományban voltak) a beállított AFR függvényében. A zöld görbe mutatja a mérési eredményeket a 100%-ban nyitott fojtószelepnél. A narancssárga görbe mutatja a maximális forgatónyomaték modelljét a folyamatos gázadásnál 60 %-ra. A fekete görbe mutatja az átlagos értéket. A mérési eredmények azt mutatják, hogy a forgatónyomaték jellege csak az AFR megfelelő beállításával lehetséges.
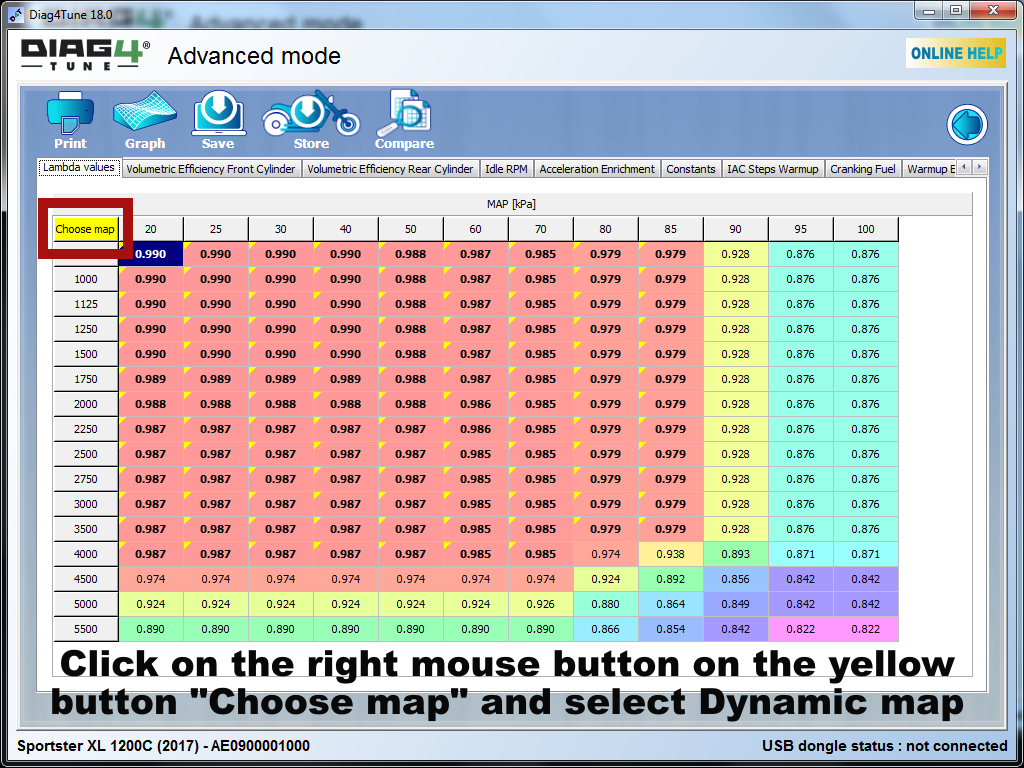
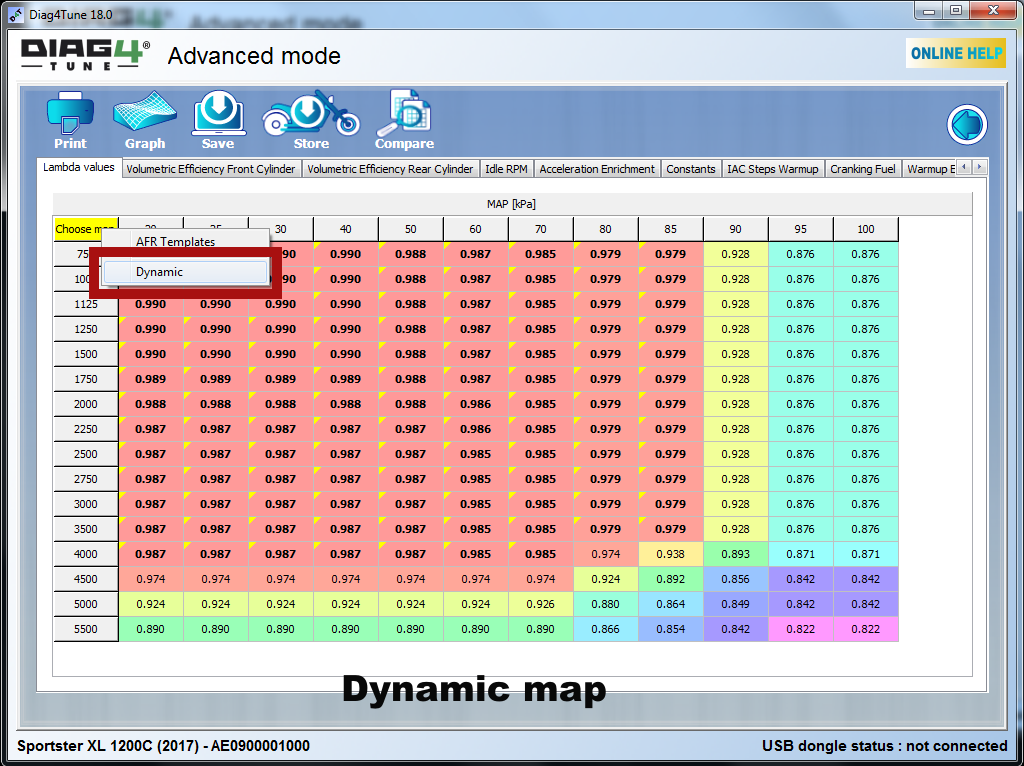
A további fejlesztések a dinamikus AFR térképek ATAL meghatározásához vezettek. Ezek a felajánlott előre beállított térképek az AFR térképek sablonjai (lásd 1-es demófilmet). A közúti próbákon meghatároztuk azt a területet, amely a tartós utazótempóhoz és a minimális dinamikus átmenetekhez szükséges. Ezeknél a módoknál nincs szükség növelni a forgatónyomaték jelleget, így nagyobb hangsúlyt kaphat a motor gazdaságossága.Emellett az optimális károsanyag kibocsátás a járó motornál.
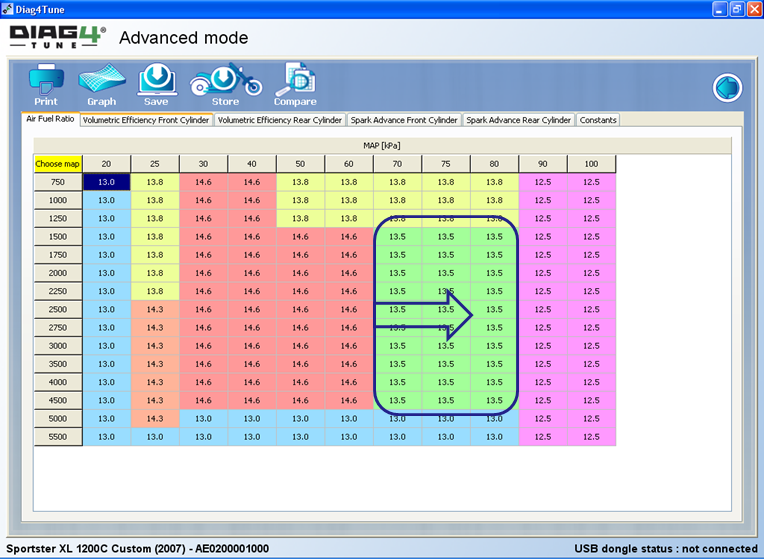
Ezek az üzemmódok rendszerint a 60 kPa-ig terjedő szívóoldali nyomás értékhatárán belül mozognak. Ebben az esetben azért, mert a cél az AFR 14,6-on tartása, vagyis a keverékarány irányításához a lambda-szenzorok zárt hurokja segítségével.
Ettől viszont teljesen eltérő a helyzet a 70 kPa feletti területen, ahogyan az meghatározásra került a szívóoldali nyomással. Ez a terület a dinamikus üzemmódokat jelenti (gyorsítások), ahol a motor potenciál igényelt kiaknázása a gazdaságos üzem rovására megy. Ezekben az üzemmódokban az AFR célértékeit 12,5-től 13,5-ig terjedő értékre kell beállítani – lásd az alábbi képeket.
A jellegzetes AFR térkép példája (XL 1200)
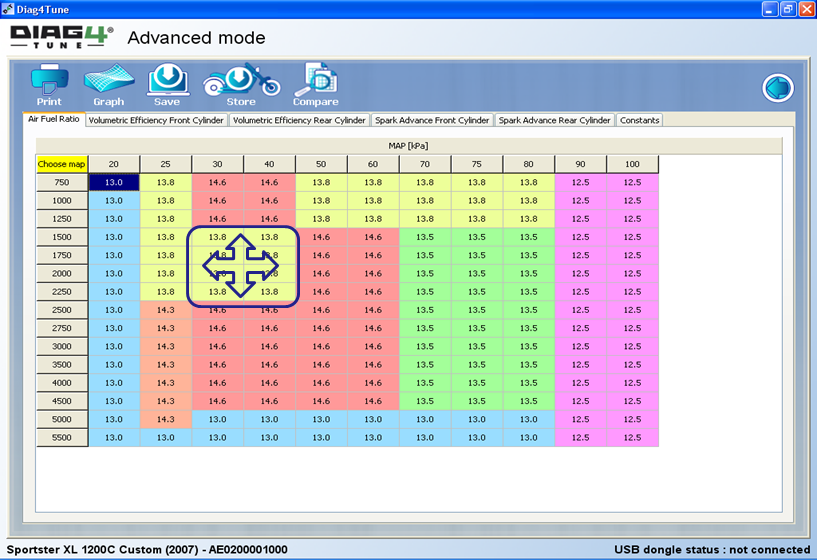
Ahogyan azt már említettük a tuning bevezetőjében, a tuning célja nemcsak a teljesítményjellegek növelése. Ebbe beletartozik a fokozott utazási kényelem is. Az egyik jól ismert példa az XL 1200, Evolution motor viselkedése nyitott szívóoldallal és kipufogó oldallal a városi közlekedésben 50 km/h (30 mph) sebességénél, jellemzően a 3. sebességfokozatban. A motor ezekben az üzemmódokban olykor járati résekkel rendelkezik, amelyek rendkívül kellemetlenek, és olykor akár a közlekedést is veszélyeztetik. A számos elemzés után arra a megállapításra jutottunk, hogy ezt a lambda-szonda zárt szabályozó körének instabil viselkedése okozza. Az Evolution, motor negatív jelenségeit jelentősen csökkentő vagy teljesen kizáró javítás az AFR 13.5-14 közötti értékre állítása (a megadott üzemmódban), a lambda-szonda visszacsatolásának kikapcsolása céljából. Minden esetben itt kellő hely kínálkozik a tuning operátorának próbáihoz. Kikereshető az AFR kompenzáció optimális értéke. Olykor a Twin Cam motoroknál is találkozhatunk hasonló gondokkal.
A jellegzetes AFR térkép példája (XL 1200)
